The Ultimate Navigation Chip (uNavChip): Chip-Scale Personal Navigation System Integrating Deterministic Localization and Probabilistic Signals of Opportunity project is designed to develop an innovative framework for location-based services to localize emergency responders, assets and equipment, and other people (e.g., patients and trapped persons) indoors and in covered outdoor environments, where GPS signals are unusable. The overall technical objective of this project is to design, build, and demonstrate a Personal Navigation System (PNS) achieving the localization accuracy on the level of 1 m in a GPS-denied environment for hours of operation. The technical approach to this project is based on simultaneous integration of Deterministic, Probabilistic, and Cooperative Localization algorithms.
Deterministic Localization
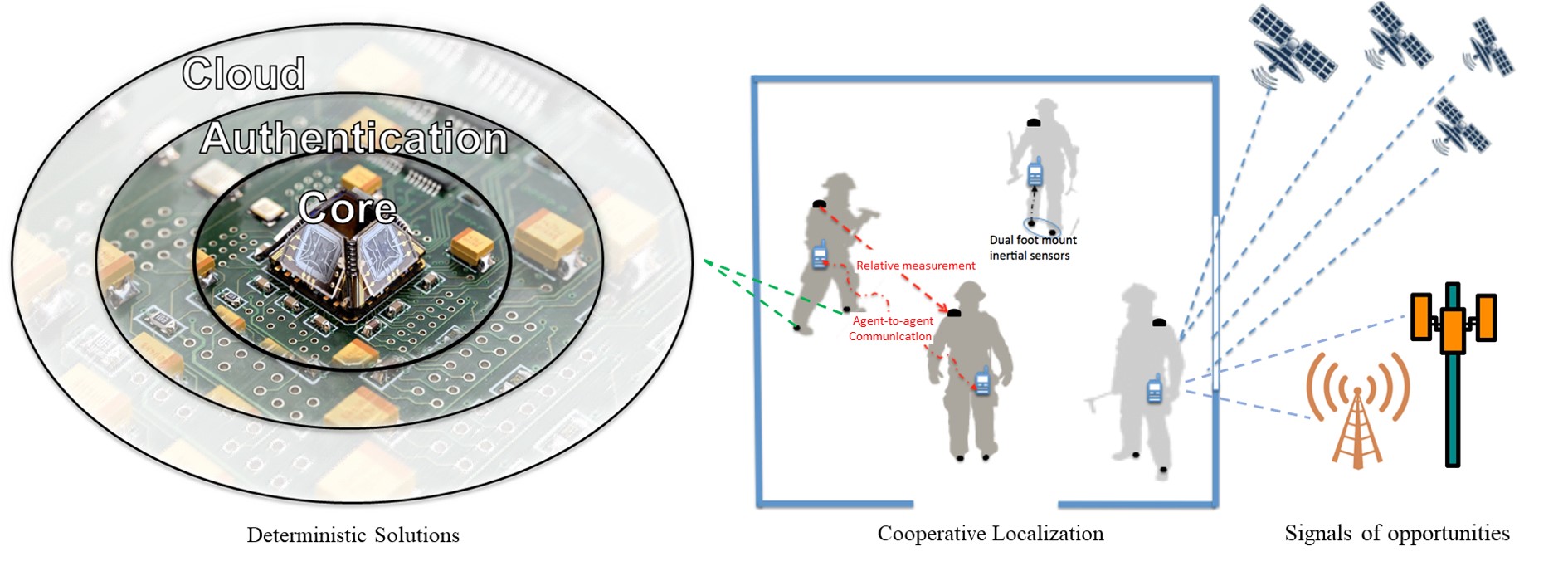
Based on Inertial Navigation augmented by ZUPting algorithms. The team will work to integrate the custom-designed MEMS Inertial Measurement Unit (IMU) integrated on the same chip with micromachined ultrasonic transducers (CMUTs). The IMU+CMUT localization unit will be integrated in the sole of shoes, for the most efficient compensation of drift. The IMU will derive the absolute orientation and position, which are regularly re-calibrated by ultrasonic transducers with Zero Velocity Updates (ZUPting) algorithms.
The ultimate vision is to have the IMU and CMUT all fabricated in parallel on both sides of a single silicon substrate and subsequently folded into a cube and locked in place using specially designed microlock mechanisms. The micro-system will be over two orders of magnitude higher in performance (near navigation grade) and smaller in size (on the order of 1 cc cm) than the current state-of-the-art.
Probabilistic Localization
Based on Signals of Opportunity. ZUPting in Deterministic Localization approach allows to contain the error growth, however, the uncertainty will still propagate due to errors in determination of zero velocity updates and residual uncompensated errors due to the pattern of motion. The Probabilistic Localization approach aims to exploit cellular signals of opportunity, which are abundant and usable in GPS challenged environments, turning cellular transmitters into our own “dedicated pseudolites.”
Cooperative Localization
Based on mobile agents, with communication and computation capabilities, jointly processing a relative measurement between each agent to increase their localization accuracy. The team will develop an integrated collaborative positioning framework that will utilize synthetic aperture navigation, aiding an inertial navigation system in an ultra-tightly-coupled fashion with cellular signals.
For more information, please check out the project websites uNavChip.